Sensor Ultrasónico HC-SR04
El sensor ultrasónico HC-SR04 es un dispositivo ampliamente utilizado en proyectos de electrónica y robótica para medir distancias de manera precisa y no invasiva. Su popularidad se debe a su bajo costo, facilidad de uso y precisión en la medición de distancias.
¿Qué es el HC-SR04?

El HC-SR04 es un sensor de ultrasonido que utiliza ondas sonoras de alta frecuencia para medir distancias. Consiste en un emisor de ultrasonido y un receptor, que trabajan juntos para determinar la distancia entre el sensor y un objeto. El emisor emite pulsos de ultrasonido que viajan a través del aire y se reflejan en el objeto. El receptor recibe los ecos de estos pulsos y calcula la distancia en función del tiempo que tardan en regresar.
¿Cómo funciona el HC-SR04?
El funcionamiento del HC-SR04 se basa en el principio de eco de ultrasonido. El sensor emite un pulso de ultrasonido y luego espera a que el eco del pulso se refleje en un objeto cercano. Midiendo el tiempo que tarda el eco en regresar al sensor, el HC-SR04 puede calcular la distancia al objeto utilizando la fórmula de distancia es igual a = velocidad x tiempo.
Creamos una pequeña demostración sobre su funcionamiento:
¿Para qué sirve el HC-SR04?
El HC-SR04 se utiliza en una variedad de aplicaciones, incluyendo sistemas de detección de obstáculos para robots móviles, sistemas de seguridad, sistemas de estacionamiento automático, y más. Su capacidad para medir distancias con precisión y en tiempo real lo hace invaluable en entornos donde se requiere evitar colisiones o medir distancias de manera eficiente.
Cómo podemos conectar nuestro HC-SR04 a nuestro Arduino:
Para conectar el sensor de ultrasonido HC-SR04 a una placa Arduino y controlarlo mediante código, sigue estos pasos:
Conexión física:
- Conecta el pin VCC del HC-SR04 al pin 5V de la placa Arduino.
- Conecta el pin GND del HC-SR04 al pin GND de la placa Arduino.
- Conecta el pin Trig (pines de control de transmisión) del HC-SR04 al pin digital 2 de la placa Arduino.
- Conecta el pin Echo (pines de control de recepción) del HC-SR04 al pin digital 3 de la placa Arduino.
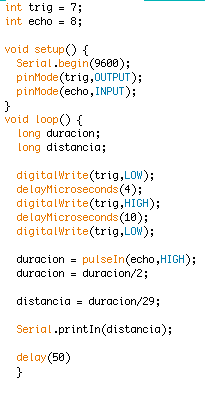
Para codificarlo escribe lo siguiente:
En resumen, el sensor ultrasónico HC-SR04 es una herramienta versátil y confiable para medir distancias en proyectos de electrónica y robótica. Su fácil integración, bajo costo y alta precisión lo convierten en una opción popular entre los aficionados y profesionales por igual.
Servomotor Arduino
El servomotor es un componente electromecánico ampliamente utilizado en la industria, la robótica y otros campos de la automatización. Es una herramienta versátil que permite controlar con precisión la posición, la velocidad y el movimiento angular de diversos dispositivos.
¿Qué es un Servomotor?
Un servomotor es un tipo de motor que incorpora un mecanismo de retroalimentación de posición. Consiste en un motor eléctrico, un conjunto de engranajes y un circuito de control electrónico integrado. La característica distintiva de un servomotor es su capacidad para mantener una posición angular específica mediante el uso de un sistema de control de lazo cerrado.

¿Cómo funciona un Servomotor?
El funcionamiento de un servomotor se basa en el principio de control de lazo cerrado. El sistema recibe una señal de control que indica la posición deseada del eje del motor. Luego, el servomotor utiliza su mecanismo de retroalimentación para comparar esta posición deseada con su posición actual. El circuito de control ajusta continuamente la velocidad y la dirección del motor para minimizar cualquier diferencia entre la posición deseada y la real, manteniendo así una precisión excepcional en la posición angular.
Creamos una pequeña demostración sobre su funcionamiento:
¿Para qué se utiliza un Servomotor?
Los servomotores se utilizan en una amplia variedad de aplicaciones donde se requiere control preciso del movimiento. Algunos ejemplos comunes incluyen:
- Robótica
- Modelismo
- Automatización industrial
- Electrónica de consumo
Cómo podemos conectar nuestro Servomotor a nuestro Arduino:
Para conectar un servomotor a un Arduino, necesitarás los siguientes materiales:
- Arduino (por ejemplo, Arduino Uno).
- Servomotor.
- Protoboard.
- Cables de puente (jumper cables).
Aquí tienes los pasos para conectar el servomotor al Arduino:
- Identifica los pines del servomotor: Un servomotor típicamente tiene tres cables: rojo (positivo), marrón/negro (negativo) y naranja/amarillo (señal).
- Conecta el cable positivo (rojo) del servomotor al pin de 5V del Arduino: Este cable suministra la alimentación al servomotor.
- Conecta el cable negativo (marrón/negro) del servomotor a la tierra (GND) del Arduino: Esto completa el circuito y proporciona una referencia de tierra para el servomotor.
- Conecta el cable de señal (naranja/amarillo) del servomotor a un pin digital del Arduino: Este pin controlará la posición del servomotor enviando señales PWM (modulación por ancho de pulso) al mismo.
Para codificarlo escribe lo siguiente:
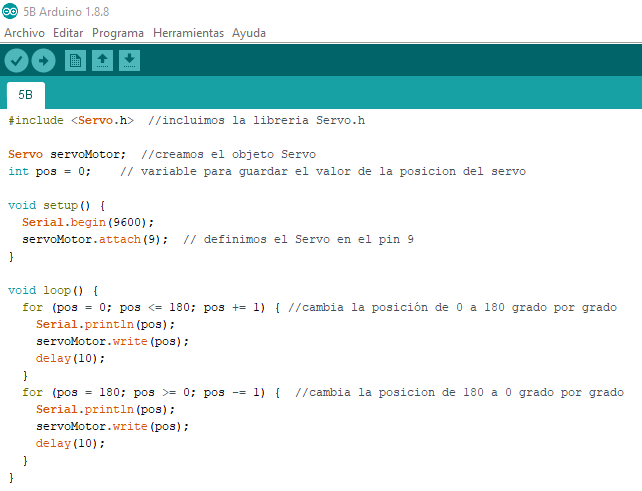
En resumen, el servomotor es un componente esencial en aplicaciones donde se requiere control de posición y movimiento preciso. Su versatilidad y capacidad para mantener una posición específica lo convierten en una herramienta invaluable en numerosos campos de la ingeniería y la automatización.
Servomotor y HC-SR04
El Servomotor y el Sensor Ultrasónico HC-SR04 son componentes fundamentales en una amplia gama de proyectos electrónicos y de robótica debido a sus diversas funcionalidades y capacidades. Cuando se utilizan juntos, pueden proporcionar soluciones innovadoras para una variedad de aplicaciones. Aquí hay algunos puntos clave sobre su utilidad combinada:
- Control Preciso de Movimiento: El servomotor permite un control preciso del movimiento angular, lo que lo hace ideal para mecanismos que requieren movimientos específicos y repetitivos, como brazos robóticos, puertas automáticas, o sistemas de seguimiento solar.
- Medición de Distancia No Invasiva: El sensor ultrasónico HC-SR04 utiliza ondas sonoras de alta frecuencia para medir distancias sin contacto. Es una herramienta invaluable para proyectos que requieren detección de obstáculos, sistemas de estacionamiento automático, y drones, entre otros.
- Detección y Control de Objetos: Al combinar el servomotor y el HC-SR04, es posible crear sistemas que detecten objetos en su entorno y respondan en consecuencia. Por ejemplo, un robot puede usar el sensor ultrasónico para detectar obstáculos y el servomotor para ajustar su trayectoria y evitar colisiones.
- Seguimiento de Objetos: Mediante el uso conjunto de ambos componentes, es posible crear sistemas de seguimiento de objetos que mantengan una distancia constante o una orientación específica con respecto a un objeto en movimiento. Esto es útil en aplicaciones como cámaras de seguimiento automático y robots que siguen a personas o animales.
- Proyectos de Domótica: En el ámbito de la domótica, el Servomotor y el HC-SR04 pueden utilizarse para crear sistemas inteligentes de control de hogar. Por ejemplo, un sistema de persianas automatizadas puede utilizar el sensor ultrasónico para detectar la presencia de personas y el servomotor para ajustar la posición de las persianas según la intensidad de la luz exterior.
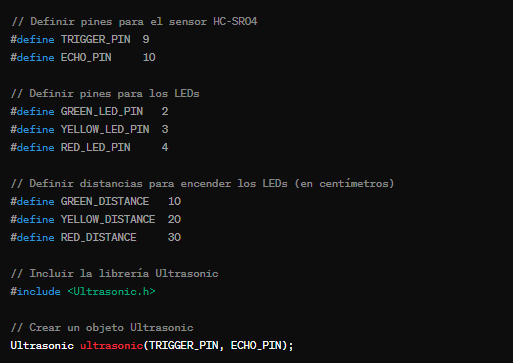
Mi equipo llevó a cabo la actividad de conectar a la placa arduino el HC-SR04 para programarlo de manera que enciendan tres leds que dependen de la distancia para su activación.
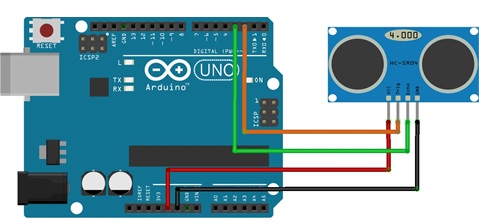
Para esto colocamos las conexiones de la siguiente manera:
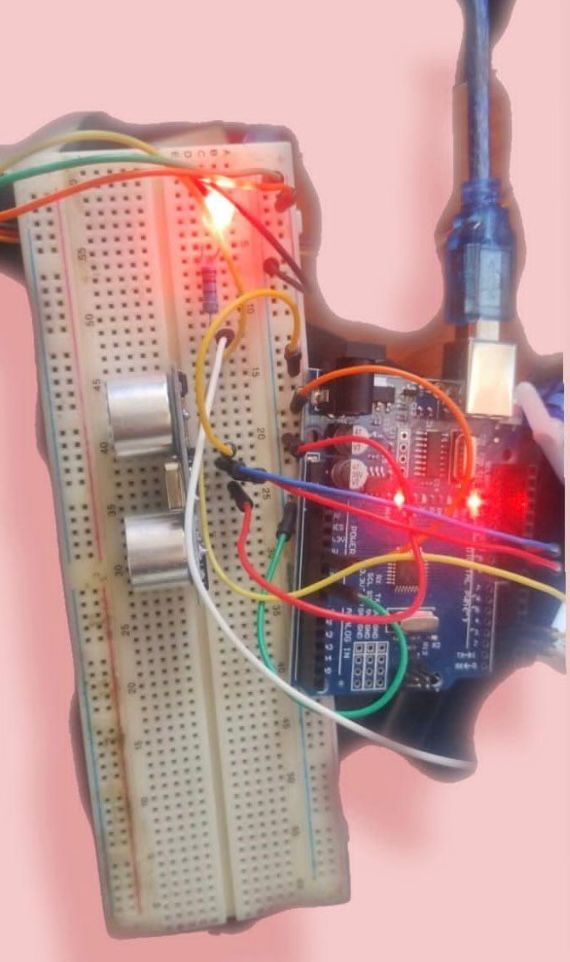
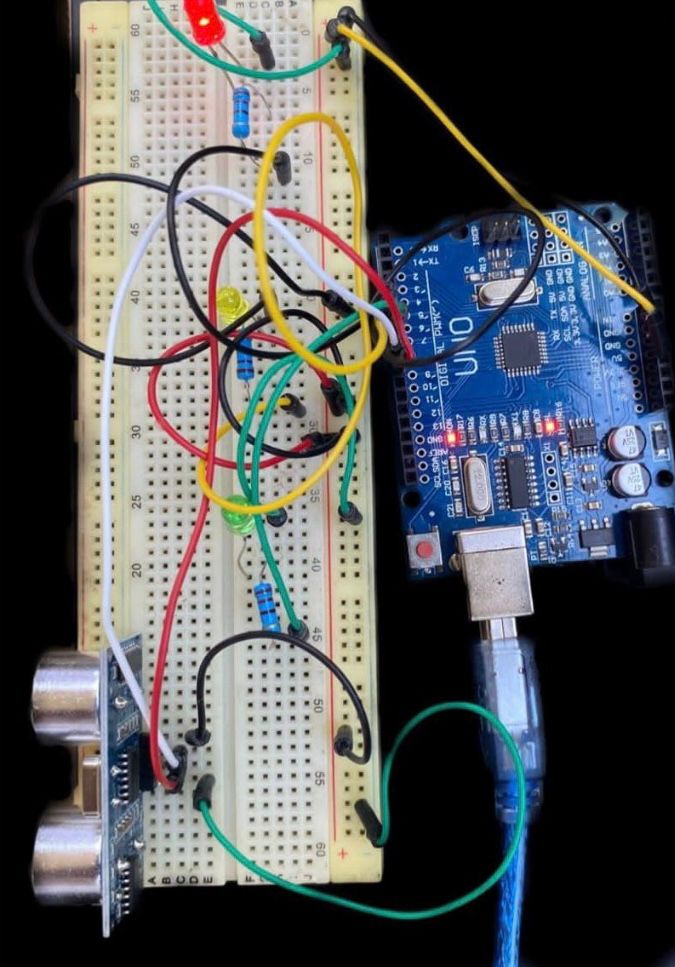
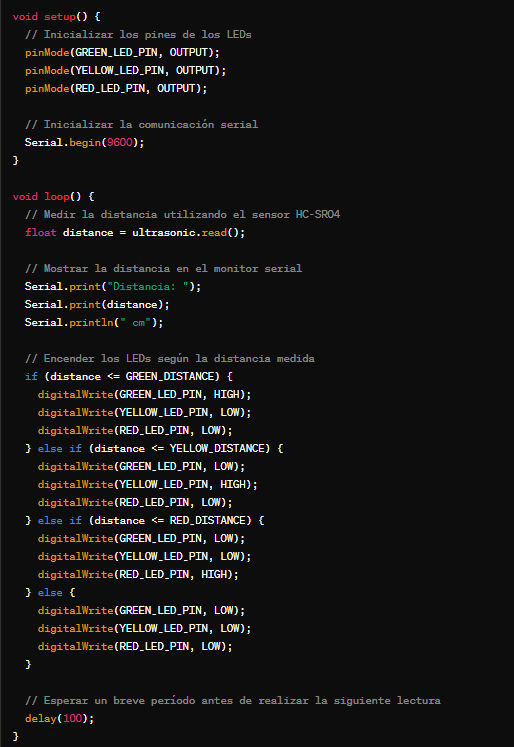
Para codificarlo escribimos lo siguiente: